|
19/04 09:08 - L'astéroïde sur lequel va se poser la Chine serait un morceau arraché à la Lune !  Patrick Michel, spécialiste mondial des astéroïdes, nous explique les enjeux scientifiques de la mission chinoise de retour d'échantillons de l'astéroïde Kamo?oalewa prévue en 2025. Cet astéroïde est intéressant en raison de son possible lien avec le cratère lunaire Giordano Bruno. Mais pas... Patrick Michel, spécialiste mondial des astéroïdes, nous explique les enjeux scientifiques de la mission chinoise de retour d'échantillons de l'astéroïde Kamo?oalewa prévue en 2025. Cet astéroïde est intéressant en raison de son possible lien avec le cratère lunaire Giordano Bruno. Mais pas...
16/04 10:15 - La Nasa appelle à l'aide pour relever le défi de rapporter sur Terre les échantillons de sols martiens  En raison de contraintes budgétaires, la mission de retour d'échantillons martiens est repoussée au mieux en 2040. La Nasa prévoit de solliciter des propositions d'architecture de l'industrie pour un retour potentiel d'échantillons dans les années 2030, dans le but de réduire les coûts, les... En raison de contraintes budgétaires, la mission de retour d'échantillons martiens est repoussée au mieux en 2040. La Nasa prévoit de solliciter des propositions d'architecture de l'industrie pour un retour potentiel d'échantillons dans les années 2030, dans le but de réduire les coûts, les...
16/04 09:13 - 50 000 objets gravitent autour de la Terre : « 5 000 fonctionnent et le reste n'est que des débris spatiaux » !  Découvrez comment l'utilisation de graphes révolutionne la surveillance et la traque des débris spatiaux, assurant ainsi la sécurité des orbites et des missions spatiales. Une approche innovante et efficace pour un environnement spatial de plus en plus encombré que nous explique Moriba Jah,... Découvrez comment l'utilisation de graphes révolutionne la surveillance et la traque des débris spatiaux, assurant ainsi la sécurité des orbites et des missions spatiales. Une approche innovante et efficace pour un environnement spatial de plus en plus encombré que nous explique Moriba Jah,...
11/04 08:14 - Le premier astronaute non-Américain qui ira sur la Lune sera un Japonais  Coopération spatiale historique entre les États-Unis et le Japon avec l'annonce qu'un astronaute japonais sera le premier non-Américain sur la Lune. Les Européens sont dans l'attente d'une opportunité similaire. Coopération spatiale historique entre les États-Unis et le Japon avec l'annonce qu'un astronaute japonais sera le premier non-Américain sur la Lune. Les Européens sont dans l'attente d'une opportunité similaire.
10/04 09:04 - La Nasa et l'ESA s'unissent pour une grande mission de recherche de la vie sur Mars  L'Agence spatiale européenne et Thales Alenia Space se sont accordés pour donner une seconde vie au rover Rosalind Franklin de la mission ExoMars, dont l'avenir était incertain après l'abandon de la coopération avec la Russie. La signature d'un contrat relance donc la mission dont l'objectif... L'Agence spatiale européenne et Thales Alenia Space se sont accordés pour donner une seconde vie au rover Rosalind Franklin de la mission ExoMars, dont l'avenir était incertain après l'abandon de la coopération avec la Russie. La signature d'un contrat relance donc la mission dont l'objectif...
05/04 17:01 - Extraordinaire : première observation d'un arc-en-ciel sur une exoplanète 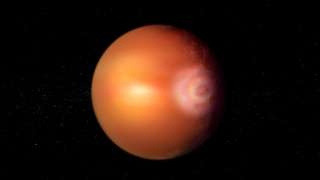 Le satellite Cheops de l'Agence spatiale européenne aurait observé des signes potentiels d'une « gloire » extrasolaire sur WASP-76b, une géante gazeuse. Ce phénomène rare ressemble à un arc-en-ciel et indiquerait des conditions atmosphériques particulières. Le télescope spatial James-Webb sera... Le satellite Cheops de l'Agence spatiale européenne aurait observé des signes potentiels d'une « gloire » extrasolaire sur WASP-76b, une géante gazeuse. Ce phénomène rare ressemble à un arc-en-ciel et indiquerait des conditions atmosphériques particulières. Le télescope spatial James-Webb sera...
04/04 17:01 - Artemis : trois entreprises en compétition pour construire un véhicule lunaire tout-terrain pour la Nasa  La Nasa lance la compétition pour le développement d'un véhicule lunaire tout-terrain pour les missions Artemis. Comme pour les atterrisseurs lunaires qui amèneront les astronautes sur la Lune, la Nasa fait le choix de l'achat de service plutôt que de développer ses propres véhicules. Premiers... La Nasa lance la compétition pour le développement d'un véhicule lunaire tout-terrain pour les missions Artemis. Comme pour les atterrisseurs lunaires qui amèneront les astronautes sur la Lune, la Nasa fait le choix de l'achat de service plutôt que de développer ses propres véhicules. Premiers...
03/04 19:01 - La plus grande caméra astronomique jamais construite bientôt installée sur son télescope  Au terme d'une conception qui aura nécessité près de deux décennies et mobilisé plusieurs centaines de scientifiques du monde entier, dont plusieurs équipes du CNRS, la plus grande caméra astronomique au monde va être acheminée vers l'Observatoire Vera C. Rubin au Chili où elle sera installée en... Au terme d'une conception qui aura nécessité près de deux décennies et mobilisé plusieurs centaines de scientifiques du monde entier, dont plusieurs équipes du CNRS, la plus grande caméra astronomique au monde va être acheminée vers l'Observatoire Vera C. Rubin au Chili où elle sera installée en...
02/04 19:06 - La NASA face à une réduction budgétaire historique : quel impact sur les programmes de l'agence spatiale américaine ?  Malgré une baisse de 2 % par rapport à l'année précédente, le budget de la Nasa pour 2025 reste le plus élevé au monde pour une agence spatiale. Sans surprise, l'accent est mis sur l'exploration humaine, ainsi que le maintien d'une présence humaine en orbite basse et pour des missions en... Malgré une baisse de 2 % par rapport à l'année précédente, le budget de la Nasa pour 2025 reste le plus élevé au monde pour une agence spatiale. Sans surprise, l'accent est mis sur l'exploration humaine, ainsi que le maintien d'une présence humaine en orbite basse et pour des missions en...
31/03 10:56 - Habitats lunaires : de nouveaux matériaux sont à l'essai, et ils sont imprimés en 3D !  Parmi les techniques envisagées pour la construction d'habitats et d'infrastructures durables sur la Lune, la fabrication additive (impression 3D) est une piste prometteuse. Dans cette optique, Stratasys, une entreprise de pointe dans le domaine des solutions d'impression 3D polymères, prévoit... Parmi les techniques envisagées pour la construction d'habitats et d'infrastructures durables sur la Lune, la fabrication additive (impression 3D) est une piste prometteuse. Dans cette optique, Stratasys, une entreprise de pointe dans le domaine des solutions d'impression 3D polymères, prévoit...
29/03 19:33 - Artemis III : voici les instruments qu'utiliseront les astronautes sur la Lune, et il est question d'agriculture...  La Nasa, toujours convaincue qu'Artemis III se posera sur la Lune fin 2026, vient tout juste de révéler les premiers instruments qui seront utilisés par les astronautes lors de cette mission historique, plus de 50 ans après Apollo 17. La Nasa, toujours convaincue qu'Artemis III se posera sur la Lune fin 2026, vient tout juste de révéler les premiers instruments qui seront utilisés par les astronautes lors de cette mission historique, plus de 50 ans après Apollo 17.
27/03 12:07 - L'Inde réussit l'atterrissage autonome de son avion spatial  L'Inde, puissance spatiale émergente qui s'affirme, poursuit le développement d'un véhicule spatial réutilisable. Après un premier essai convaincant en avril 2023, le prototype de ce véhicule a réalisé un nouveau vol libre axé sur l'atterrissage autonome. Un essai plutôt réussi. L'Inde, puissance spatiale émergente qui s'affirme, poursuit le développement d'un véhicule spatial réutilisable. Après un premier essai convaincant en avril 2023, le prototype de ce véhicule a réalisé un nouveau vol libre axé sur l'atterrissage autonome. Un essai plutôt réussi.
21/03 09:22 - Les chances que la vie ait existé sur Mars se réduisent  Une étude remet en question la possibilité d'une vie sur Mars en suggérant que les paysages martiens, auparavant attribués à l'eau liquide, pourraient en réalité résulter de la sublimation de la glace de dioxyde de carbone. Cette étude met en lumière le rôle important du dioxyde de carbone dans... Une étude remet en question la possibilité d'une vie sur Mars en suggérant que les paysages martiens, auparavant attribués à l'eau liquide, pourraient en réalité résulter de la sublimation de la glace de dioxyde de carbone. Cette étude met en lumière le rôle important du dioxyde de carbone dans...
21/03 08:27 - Queqiao-2, un pas en avant dans l'exploration lunaire chinoise 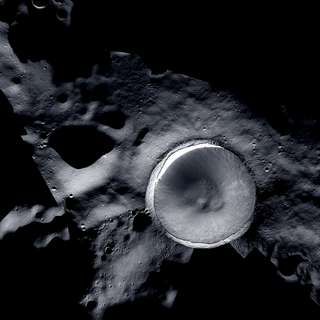 La Chine vient de réussir le lancement d'un nouveau satellite de relais pour soutenir les futures missions du programme lunaire Chang'e. C'est pour nous l'occasion de rappeler les trois prochaines missions robotiques qui seront lancées d'ici la fin de la décennie. La Chine vient de réussir le lancement d'un nouveau satellite de relais pour soutenir les futures missions du programme lunaire Chang'e. C'est pour nous l'occasion de rappeler les trois prochaines missions robotiques qui seront lancées d'ici la fin de la décennie.
20/03 10:27 - Le télescope Euclid s'envole le 1er juillet sur les traces des deux plus grands mystères de l'Univers 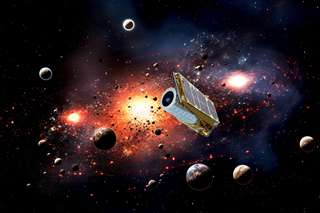 L'ESA va lancer sa prochaine mission spatiale, Euclid, le 1er juillet. Ce satellite inédit, réalisé sous la maîtrise d'?uvre de Thales Alenia Space, a pour but de mieux comprendre l'Univers sombre, c'est-à-dire la matière noire et l'énergie sombre dont on sait très peu de choses sur leur nature... L'ESA va lancer sa prochaine mission spatiale, Euclid, le 1er juillet. Ce satellite inédit, réalisé sous la maîtrise d'?uvre de Thales Alenia Space, a pour but de mieux comprendre l'Univers sombre, c'est-à-dire la matière noire et l'énergie sombre dont on sait très peu de choses sur leur nature...
|



