| |
|
| |
En collaboration avec ,
le portail spatial francophone dédié aux observateurs
de satellites artificiels
|
| |
|
| 19.03.08 |
STS-123
Dextre a été intégré à la Station
spatiale internationale |
| |
Dextre, le manipulateur agile spécialisé canadien, a été intégré
avec succès à la Station spatiale. Il est maintenant opérationnel
et prêt à fonctionner. Au cours des prochains mois, il sera mis
à l'épreuve afin d'évaluer son rendement.
3 sorties extravéhiculaires
Trois sorties dans l'espace auront donc été nécessaires aux astronautes
pour l'assembler complètement. Les mains du robot l'ont été pendant
la première sortie, les bras lors de la seconde sortie. Dans la
nuit de lundi à mardi, la troisième EVA a permis à 2 astronautes
d'achevé son assemblage en installant une plateforme pour entreposer
les pièces de rechange pour les réparations ainsi qu'un système
pour attacher les outils du robot.
Avec l'intégration réussie de Dextre, le Système canadien d'entretien
mobile de la Station spatiale internationale est maintenant au complet.
Ce système est constitué du Canadarm2 (SSRMS, Space Station Remote
Manipulator System), de la Base mobile (MBS, Mobile Base System)
et donc du Manipulateur agile spécialisé Dextre (SPDM, Special Purpose
Dexterous Manipulator).
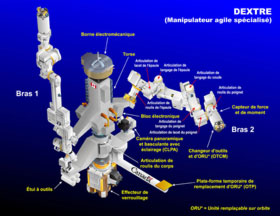
Dextre : le manipulateur agile spécialisé
D'une grande dextérité, ce robot à 2 bras pèse 1542 kg et
mesure 3,6 m de haut pour une envergure d'épaules de près de 2,4m. Dextre peut se déplacer de manière autonome ou
être transporté par les deux autres éléments du système, soit la
base mobile et le Canadarm2. Il pourra être installé à l'extrémité
du Canadarm2, sur la Base mobile ou sur l'un des points de stabilisation
(connus sous le nom de bornes électromécaniques) répartis sur la
Station.
de près de 2,4m. Dextre peut se déplacer de manière autonome ou
être transporté par les deux autres éléments du système, soit la
base mobile et le Canadarm2. Il pourra être installé à l'extrémité
du Canadarm2, sur la Base mobile ou sur l'un des points de stabilisation
(connus sous le nom de bornes électromécaniques) répartis sur la
Station.
Le Système d'entretien
mobile avec Dextre (à droite) Crédits MD Robotics
/ CSA
Cependant, il sera utilisé le plus souvent monté à l'extrémité libre
du Canadarm2 qui le conduira à proximité de la charge utile à entretenir
le long de la grande poutre de la Station. Fixé sur la base mobile,
il pourra fonctionner de concert avec le Canadarm2. Dextre à la
manutention pendant que le bras robotique lui fournit l'équipement
d'entretien.
Il sera utilisé pour enlever et remplacer de petits composants à
l'extérieur de la station, là où une manipulation de précision est
requise. Il est équipé de projecteurs, de matériel vidéo, d'une
plate-forme d'outils et de quatre porte-outils. Il vient ainsi équiper
la station de nouveaux outils robotiques et permettre la réalisation
de tâches délicates liées à la construction et à l'entretien du
complexe orbital qui est désormais beaucoup plus imposant qu'il
ne l'était lors de l'installation du Canadarm2 en 2001. Dextre permettra
d'accélérer les activités d'assemblage de la Station.
Poignée de mains canadiennes dans l'espace
Dextre a été extrait de la soute de la navette lors
d'une manœuvre connue sous le nom de 'poignée de
mains canadiennes dans l'espace' quand le bras robotique de
la navette transfert le robot canadien au bras de la Station (Canardarm2).
L'image ci-dessous montre le Canadarm2 (à droite) transférant
du matériel au bras robotique canadien de la navette Endeavour
(avril 2001).
|
| |
Dextre : le manipulateur agile spécialisé
|

La poignée de mains canadiennes dans l’espace
|

Dextre sur sa palette de transport, encore en kit
|

Dextre assemblé et intégré à la
Station
|

Dextre opérationel
|

Dextre opérationel
|
| Crédit NASA |
|
| |
Articles connexes
(25.03.08)
(18.03.08)
(15.03.08)
(12.03.08)
(22.02.08)
(16.02.08)
(07.02.08)
(22.10.07)
(08.08.07)
(08.06.07)
(11.12.06)
(19.09.06)
|
| |
top
|
| |
|
| |
Copyright
2000 - 2008 © flashespace.com. All rights reserved |
|