| |
|
| |
|
| 18.03.08 |
Le
Canada à la pointe dans la robotique spatiale |
| |
Nous devons au Canada les bras télémanipulateurs Canadarm qui équipent
les navettes spatiales, la perche d'inspection OBSS et le Système
d'entretien mobile (MSS), un des éléments essentiels de la Station
spatiale internationale. Il est constitué du Canadarm2 (SSRMS, Space
Station Remote Manipulator System), de la Base mobile (MBS, Mobile
Base System) et du Manipulateur agile spécialisé (SPDM, Special
Purpose Dexterous Manipulator), plus communément appelé Dextre et
en cours d'installation.
Les bras télémanipulateurs Canadarm
Les quatre RMS ont été mis au point et fabriqués par la firme canadienne
dans le cadre d'un accord conclu entre la NASA et
la du Canada. Le premier de ses bras (RMS pour
Remote Manipulator System) a été installé en juin 1981 sur Columbia.
Le bras est installé sur le longeron principal gauche de la paroi
de la soute de la navette. Son épaule est située du coté de la cabine.
Long de 15,3 m pour 38 cm de diamètre, il repose sur trois supports.
Son dessin reprend celui du bras humain : une épaule, un coude et
une poignée ! Cependant, alors que le poignet de notre bras permet
une liberté de mouvement de 30°, celui des navettes se limite à
6°. D'une masse de 410,5 kg, il est capable de déplacer dans l'espace
des charges de plus de 30 tonnes, mais il reste incapable de supporter
son propre poids sur Terre.
Les astronautes utilisent Canadarm lors des sorties extravéhiculaires,
notamment celles rendues nécessaires par l'assemblage des modules
de l'ISS. De part sa conception, il offre une amplitude de mouvement
remarquable : sa mobilité lui permet de placer un astronaute aux
différentes parties de la navette et sa précision est de l'ordre
du degré.
Une fois déployé, le bras peut pivoter sur lui-même dans toutes
les directions. Du fait de sa position sur le longeron principal
gauche de la paroi de la soute de la navette, le bras ne peut se
balancer, au niveau de l'épaule, qu'entre + 145 ° et - 2°. Le coude
est capable de se plier en deux, mais dans un seul sens. Enfin,
la main du bras, sur laquelle il est possible d'adapter un dispositif
supportant un astronaute, peut effectuer une rotation au-delà d'un
tour complet (447°).
La perche d'inspection OBSS
A la suite de perte de la navette Columbia, il a été décidé d'équiper
le reste de la flotte de navette d'un système permettant l'inspection
en orbite des tuiles de la protection thermique de la navette.
La NASA et la firme canadienne (MDA) ont développé et construit l'OBSS (Orbiter Boom
and Sensor System), un ingénieux système d'analyse de l'orbiteur
en vol. MDA a construit la perche, qui prolonge le bras robotique
Canadarm, à l'extrémité de laquelle sera installée une plate-forme
qui supporte 3 instruments servant à évaluer le système de protection
thermique des orbiteurs. On compte un système d'imagerie laser 3D
haute résolution contrôlé par un logiciel installé dans la cabine,
une caméra vidéo noir et blanc à amplification de lumière et un
système d'imagerie laser 2D et 3D.
Longue de plus de 15 m, la perche d'inspection s'appuie sur du matériel
existant de sorte que sa conception est pour ainsi dire la même
que celle du bras de la navette sauf pour ce qui concerne les articulations.
Celles-ci ont en effet été dotées de manchons de transition en aluminium
qui les rigidifient solidement en place. Elle est constituée de
tubes provenant de pièces de rechange des Canadarm de la navette
au bout desquels on a installé une plate-forme d'instruments.
La perche a à peu près les mêmes dimensions que le Canadarm de la
navette, ce qui permet de l'installer du côté tribord de la navette
dans un mécanisme de retenue destiné à l'origine à recevoir un second
bras. Une fois en orbite, le bras de la navette et celui de la station
spatiale peuvent saisir la perche. Le bras télémanipulateur amarré
au côté bâbord de la soute ira agripper l'OBSS pour ensuite l'utiliser
pour inspecter la protection thermique. L'OBSS ne devra pas être
déplacé à plus de 5 cm à la seconde pour pouvoir enregistrer des
détails significatifs ou des dommages.
|
| |

La perche inspection OBSS installée à l'extrémité
du Canadarm
Crédit NASA
|
| |
Système d'entretien mobile
Canadarm2
En fournissant le Canadarm2 le Canada s'est vu attribuer le droit
d'utiliser 2,3 % des ressources des laboratoires scientifiques dans
les sections non russes de la Station, ainsi qu'une plate-forme
externe pour l'exposition d'expériences.
Canadarm2 a été installé en avril 2001 (STS-100), mesure 17,6 m
une fois déployé et six articulations l'animent. Une fois complètement
opérationnel, prévu en janvier 2004 avec l'adjonction du Manipulateur,
il sera capable de déplacer du matériel et des équipements tout
autour de la station, de capturer et relâcher des petits satellites
et d'aider les astronautes au cours de leurs sorties dans l'espace,
notamment celles dédiées à la poursuite de l'assemblage de la Station,
ce qu'il fait déjà.
Le bras à la particularité intéressante de se fixer soit à la Base
mobile mais aussi à Destiny ce qui lui confère un rayon d'action
important et une grande manuvrabilité.
Base mobile
La base mobile est installée sur le Transporteur mobile américain
depuis le mois de juin 2002 (STS-111). Cette plate-forme mobile
est aussi un poste de stockage utilisé par les astronautes lors
de sorties extravéhiculaires. Equipée de quatre bornes électromécaniques,
elle peut servir de base pour le Canadarm2 et le Manipulateur agile
spécialisé. Le transporteur, qui la supporte, peut se déplacer sur
près de 40 m de rails fixés aux poutres installées au-dessus de
Destiny. Ces poutres (segments), au nombre de 9 au 1er mars 2008
font parties de l'ITS, Integrated Truss Structure. Au terme de son
assemblage, l'ITS sera composées de 11 poutres et mesurera 109 m.
Elle supportera alors les huit paires de panneaux solaires américains.
CETA
Les CETA (Crew & Equipment Translation Aid) sont des chariots de
transport qui évoluent de part et d'autre du Transporteur mobile
américain sur lequel est installée la base mobile canadienne qui
supporte le Canadarm2. Surnommés Cart A et Cart B ils peuvent être
mis en uvre manuellement par un astronaute en sortie extravéhiculaire
et/ou utilisés comme plate-forme de travail.
|
| |
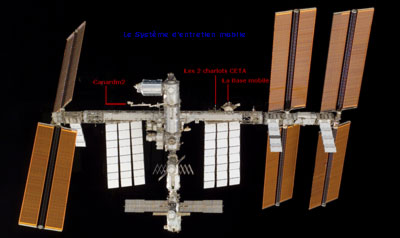
Le Système d'entretien mobile de la Station
Crédit NASA
|
| |
Dextre
Le manipulateur agile spécialisé, plus communément appelé Dextre
est le troisième et dernier élément du Système d'entretien mobile,
la contribution du Canada à la Station spatiale internationale.
D'une grande dextérité, d'où son nom, il est constitué de deux bras.
Dextre pourra être installé à l'extrémité du Canadarm2, sur la Base
mobile ou sur l'un des points de stabilisation (connus sous le nom
de bornes électromécaniques) répartis sur la Station. Cependant,
il sera utilisé le plus souvent monté à l'extrémité libre du Canadarm2
qui le conduira à proximité de la charge utile à entretenir le long
de la grande poutre de la Station.
Fixé sur la base mobile, il pourra fonctionner de concert avec le
Canadarm2. Dextre à la manutention pendant que le bras robotique
lui fournit l'équipement d'entretien.
Il sera utilisé pour enlever et remplacer de petits composants à
l'extérieur de la station, là où une manipulation de précision est
requise. Il est équipé de projecteurs, de matériel vidéo, d'une
plate-forme d'outils et de quatre porte-outils.
|
| |

Dextre, en cours d'installation (STS-123)
Crédit NASA
|
| |
top
|
| |
|
| |
Copyright
2000 - 2008 © flashespace.com. All rights reserved |
|